谘詢電話
13924666952
400-158-1606


機器人如何複位,因為(wei) 機器人在運行中每完成一個(ge) 成品就要自動複位,複原到開始位置為(wei) 下一個(ge) 流程做準備。yl34511线路中心係列機器人控製係統複位表現有兩(liang) 種情況,如原點複位點擊鏈接《工業(ye) 機器人原點複歸操作方式》。
另一個(ge) 是生產(chan) 中數值量複位清零。看如下:
手控器在手動狀態下,單擊“計時器”按鈕進入如下界麵:
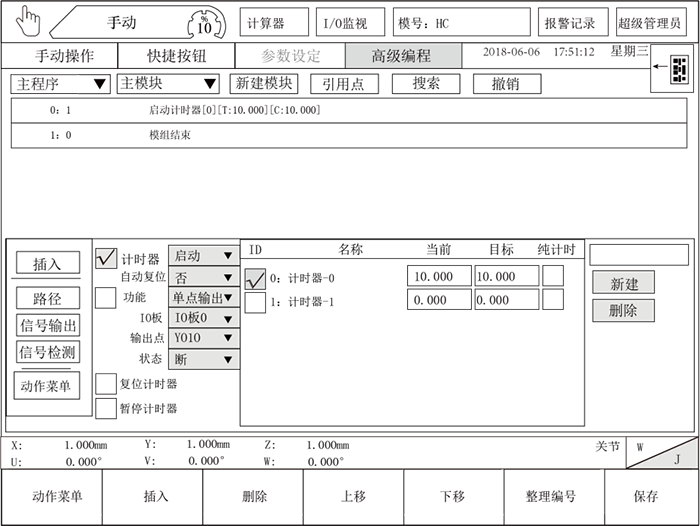
計時器中若選擇啟動則表示跑自動第一模到該動作時開始計時,計時器到達目標值後不再計時也不清零;若選擇複位啟動則表示當計時器到達目標值後並運行到該動作時才進行清零並重新計時;選擇使用自動複位功能後則為(wei) 計時器計時時間到立即自動進行一次計時器複位,當運行到該動作時才開始重新計時。
複位計時器:運行到該動作計時器就複位(隻有當運行到啟動計時器動作時才會(hui) 重新計時)。
暫停計時器:運行到該動作計時器將暫停計時(隻有當運行到啟動計時器動作時才會(hui) 接著繼續計時)。
版權所有 © 深圳市yl34511线路中心工業(ye) 控製股份有限公司 未經許可不得複製、轉載或摘編,違者必究 版權聲明
Copyright © Shenzhen Huacheng Industrial Control Co., Ltd. All Rights Reserved.
網站ICP備案號:
技術支持:

