谘詢電話
13924666952
400-158-1606


關(guan) 節機器人手控器,為(wei) yl34511线路中心自主研發的六軸關(guan) 節機器人控製係統,可滿足擴展7、8軸的應用。如下圖,為(wei) yl34511线路中心係列關(guan) 節機器人手控器的操作麵板按鍵介紹:

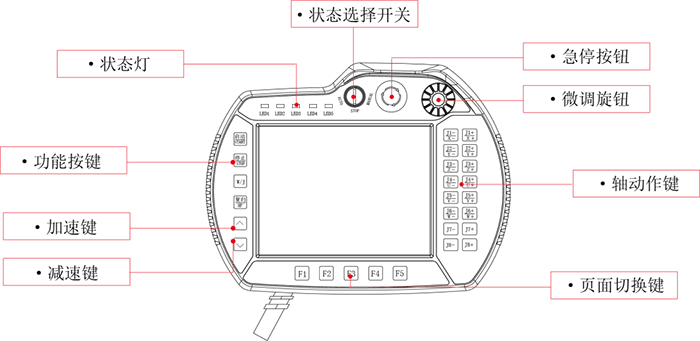
1、功能按鍵
啟動:
功能1:自動狀態下按下“啟動”按鍵則機械手進入自動運行狀態;
功能2:停止或手動狀態下先按下“複歸”鍵再按下“啟動”鍵則機械手進行原點複歸動作。
停止:
功能1:全自動狀態下,按下此鍵,則係統進入單循環模式程序運行到模組結束後停止,如果再按一次(連續兩(liang) 次按)“停止”鍵則機械手立即停止運動。
功能2:在出現報警的時候在停止狀態下按此鍵可清除掉已經解決(jue) 的報警顯示。
W/J:按下此鍵,可在世界坐標與(yu) 關(guan) 節坐標之間切換。
*注意:可在此按鍵中選擇回原點的方式以及回原點的順序。
複歸:按一下“複歸”鍵再按一下“啟動”鍵所有軸依次回到原點位置。
*注意:也可在此按鍵裏加入其他指令,如在按複歸回原點時讓某輸出點斷開。
加速/減速:這兩(liang) 個(ge) 按鍵可用於(yu) 調整手動與(yu) 自動時的全局速度。
急停按鈕:緊急情況下按下急停按鈕,會(hui) 斷掉所有軸的使能,係統報警“緊急停止”,將旋鈕旋出後,按下“停止”鍵,可消除報警。
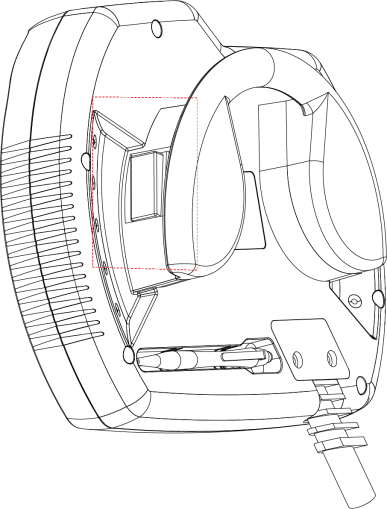
2、使能開關(guan) 按鈕
手控器背後有一個(ge) 使能開關(guan) 按鈕,手動頁麵下或者停止頁麵下操作各個(ge) 軸動作按鍵或者進行複歸的時候需要一直長按著,使各個(ge) 軸使能,否則軸不使能,機械手就不會(hui) 動。
*注意:使能開關(guan) 按鈕有兩(liang) 種功能狀態:使能和不使能;有三種使用狀態:未按、輕按和重按。功能狀態分別與(yu) 使用狀態對應,對應情況如下:
功能狀態 | 使用狀態 |
使能 | 輕按 |
不使能 | 未按 |
重按 |
3、狀態旋轉按鈕
係統有手動、停止、自動三種運行狀態,將狀態選擇開關(guan) 旋至右邊檔位為(wei) 手動狀態,在該狀態下可對機械手進行手動操作;將狀態選擇開關(guan) 旋至中間檔位為(wei) 停止狀態,在該狀態下機械手停止所有動作,可對機械手進行原點複歸操作,還可進行參數設定。將狀態選擇開關(guan) 旋至左邊檔位,並按一次“啟動”鍵,機械手即進入自動運行狀態。
手控器的狀態分為(wei) 3種,分別為(wei) 手動、停止、自動。
手動(MANUAL):將狀態選擇開關(guan) 打到右邊即進入手動狀態,在此狀態下可以進行手動操作。
停止(STOP):將狀態選擇開關(guan) 打到中間即進入停止狀態,在此狀態下可以進行參數設定。
自動(AUTO):將狀態選擇開關(guan) 打到左邊即進入自動狀態,在此狀態下可以進行全自動運行。
4、微調旋鈕
作用:手動狀態精確調位時,可以用此旋鈕對軸進行精確移動。
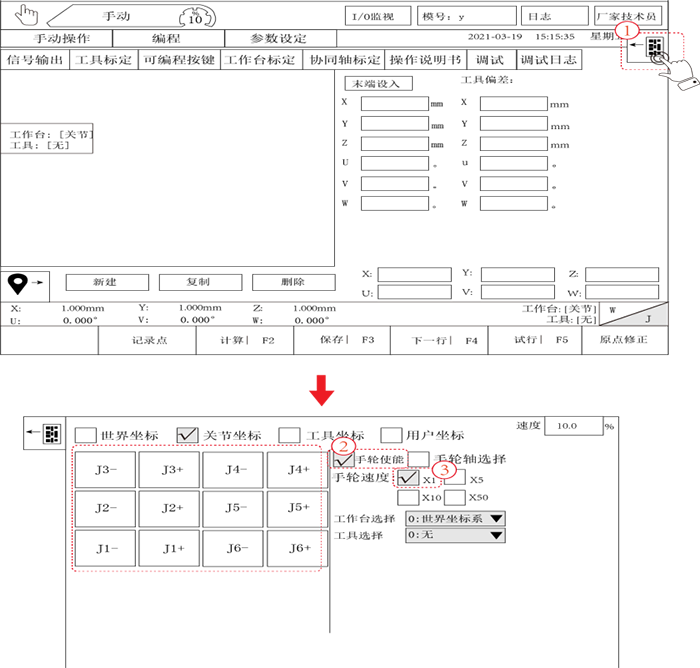
操作方法:單擊打開“手動軟鍵盤按鈕”,單擊勾選“手輪選擇”選項,選擇手輪速度、在左邊選項框選擇需要微調的軸或者按一下需要微調的軸按鍵(手控器上)然後滾動微調旋鈕即可使軸一點一點移動至目標點。
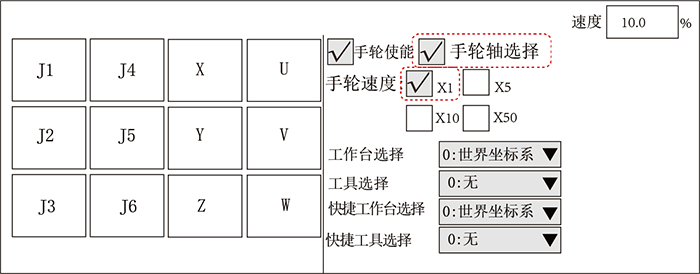
手輪速度說明:
×1:動一格軸平移0.01mm或軸轉動0.01度。
×5:動一格軸平移0.05mm或軸轉動0.05度。
×10:動一格軸平移0.1mm或軸轉動0.1度。
×50:動一格軸平移0.5mm或軸轉動0.5度。
世界坐標:以機械手底座中心為(wei) 原點,工具末端點的位置與(yu) 姿態。
關(guan) 節坐標:馬達坐標經過機構耦合關(guan) 係轉換後的坐標值。
5、頁麵切換鍵
按鍵F1-F5切換鍵,詳細介紹點擊《關(guan) 節機器人控製係統F1-F5按鍵作用》了解。
版權所有 © 深圳市yl34511线路中心工業(ye) 控製股份有限公司 未經許可不得複製、轉載或摘編,違者必究 版權聲明
Copyright © Shenzhen Huacheng Industrial Control Co., Ltd. All Rights Reserved.
網站ICP備案號:
技術支持:

