谘詢電話
13924666952
400-158-1606


關(guan) 節衝(chong) 壓機器人機械手應用係統為(wei) yl34511线路中心係列四軸關(guan) 節機器人衝(chong) 壓係統,需要多工位的機器人聯動實現全自動化的衝(chong) 壓流水線生產(chan) ,設置如下:
首先,撥動運行狀態“停止狀態”,點擊程序下的【功能】選擇,在設定頁麵點擊【機械】按鈕可進入機器參數頁麵,切換到子分類【結構】選擇【機械手配置】,如下圖:

1、CAN類型:可以選擇主機,從(cong) 機,無。
若單台機器,選擇無。
若多台聯機,則整個(ge) 係統中隻能有一個(ge) 主機,其他必須選擇從(cong) 機。且每台機器的 CAN ID不能重複(CAN ID必須從(cong) 1開始,主機必須為(wei) 1)。
2、CAN ID
若單台機器,選擇衝(chong) 床1。
若多台聯機,如有3台聯機,則主機需選擇機械手1-機械手3。其他2台從(cong) 機都隻需選擇機械手1;
設置完成後要把頁麵上方的單機聯機按鈕設置為(wei) 聯機。

主機
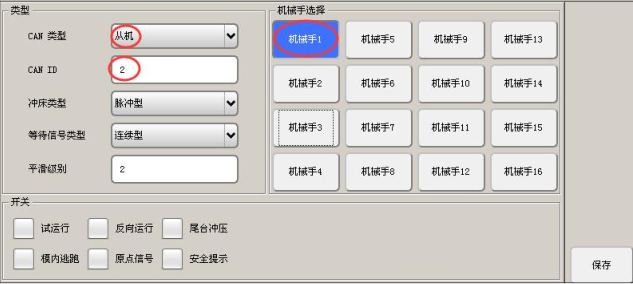
從(cong) 機1
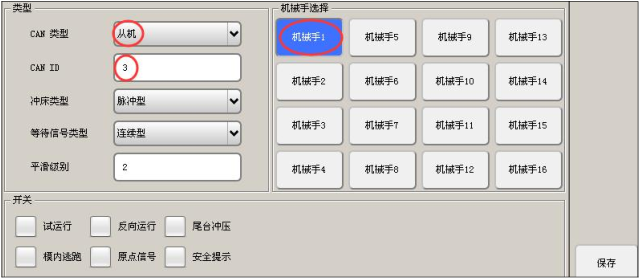
從(cong) 機2
版權所有 © 深圳市yl34511线路中心工業(ye) 控製股份有限公司 未經許可不得複製、轉載或摘編,違者必究 版權聲明
Copyright © Shenzhen Huacheng Industrial Control Co., Ltd. All Rights Reserved.
網站ICP備案號:
技術支持:

