谘詢電話
13924666952
400-158-1606


RX係列機器人控製係統,為(wei) 通用的驅控一體(ti) 係統,為(wei) 使機械手能夠正確的運行,安裝好機械手第一次上電後需先確認各伺服軸是否能正常運行。請做以下操作進行測試。
第一步:請將狀態選擇開關(guan) 指向“STOP”,按下急停開關(guan) 。上電後拔起急停開關(guan) ,消除報警,觀察機械是否會(hui) 出現向下移動現象。未出現向下移動現象,繼續執行第二步。
第二步:在“STOP”狀態下,點擊“參數設定”選項,進入“參數設定”頁麵,再點擊“機器設定”,在“機器設定”頁麵中點擊“電機參數”按鈕可進入機器參數的設定頁麵,在該頁麵可以設定各軸的參數。進入頁麵後,直接進入X軸的參數設定,如下圖:
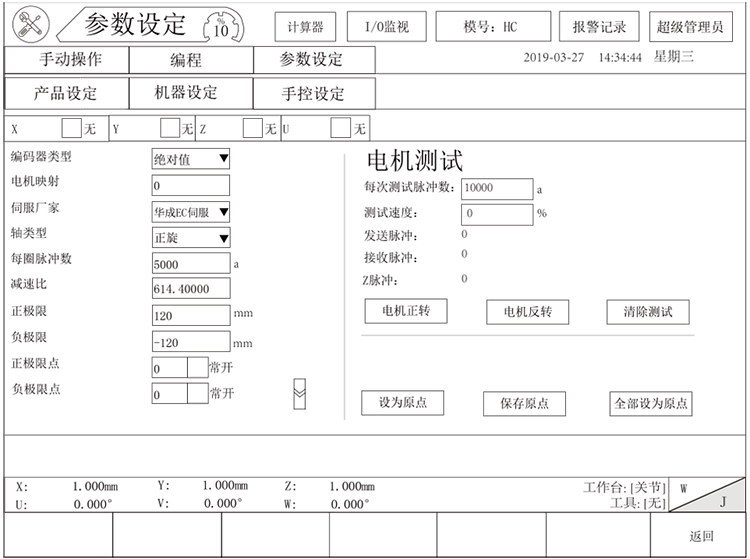
第三步:在此頁麵中進行“電機正反轉”測試。
電機正反轉測試:輕按使能開關(guan) ,讓電機使能,點擊“電機正轉”,電機將會(hui) 向正方向旋轉一圈,轉完後當前頁麵中的發送脈衝(chong) 和接收脈衝(chong) 一致為(wei) 設定的測試脈衝(chong) 數;點擊“電機反轉”,電機將會(hui) 向反方向旋轉一圈,轉完後當前頁麵中的發送脈衝(chong) 和接收脈衝(chong) 一致為(wei) 設定的測試脈衝(chong) 數的負數。
注意:發送的脈衝(chong) 數不是一定按照設定的來,它可能會(hui) 丟(diu) 失幾個(ge) 。如,設定的測試脈衝(chong) 數為(wei) 10000,正轉後電機測試頁麵顯示發送脈衝(chong) 9994,接收脈衝(chong) 9994;反轉後電機測試頁麵顯示發送脈衝(chong) -9994,接收脈9994,這是正常的。
版權所有 © 深圳市yl34511线路中心工業(ye) 控製股份有限公司 未經許可不得複製、轉載或摘編,違者必究 版權聲明
Copyright © Shenzhen Huacheng Industrial Control Co., Ltd. All Rights Reserved.
網站ICP備案號:
技術支持:

