谘詢電話
13924666952
400-158-1606


RX係列驅控一體(ti) 機器人控製係統,權限切換在超級管理員,I/O設定如下:首先點擊“IO設定”按鈕進入如下所示的界麵,在此界麵下可對IO進行相關(guan) 設定。
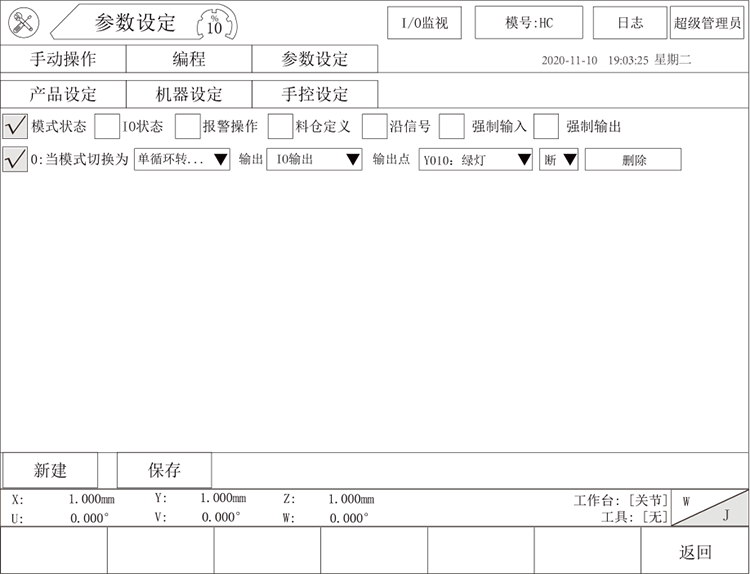
一、模式狀態功能主要用於(yu) 切換成某種模式後能自動控製信號的通斷狀態。
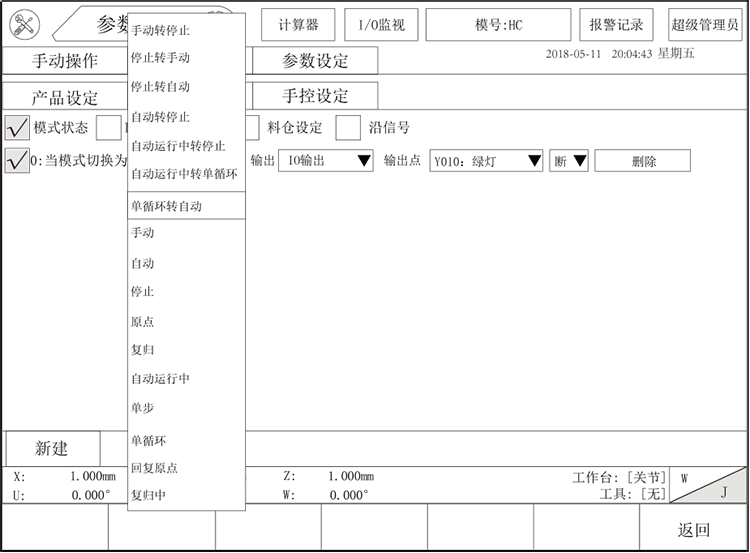
首先點擊新建按鈕並將新建成的進行勾選,然後在“當模式切換為(wei) ”選擇相應的狀態,如:手動,自動,自動轉停止等等。再在“輸出”裏選擇IO輸出或者M值輸出,然後在“輸出點”裏選擇相應的點。
注意:可以新建多個(ge) 且隻有點擊保存才生效,不用的時候可以去掉“√”或者點擊後麵的刪除(也需要點擊保存)。
二、IO狀態功能主要用於(yu) 某些模式下通過控製輸入輸出某個(ge) 信號的通斷狀態來自動使另一個(ge) 輸出信號進行通斷。
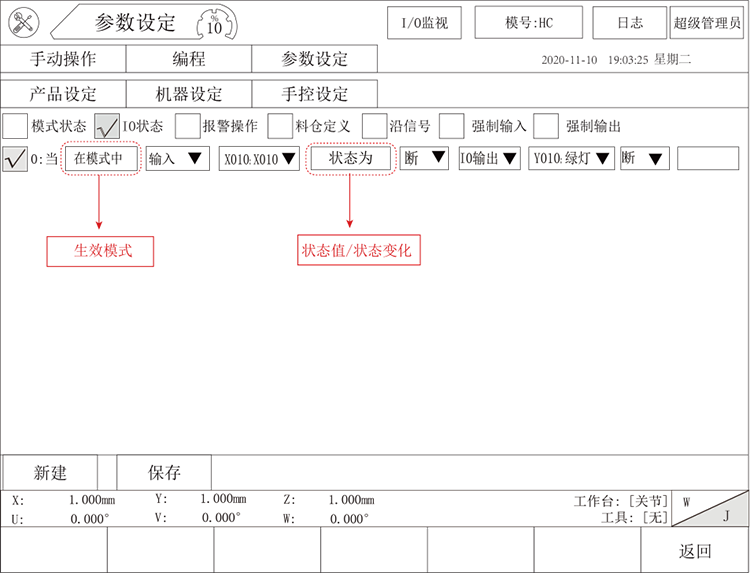
首先點擊新建按鈕並將新建成的進行勾選,然後點擊“在模式中”選擇相應的狀態,如:手動模式、停止模式、自動模式等等。再選擇輸入或輸出某個(ge) 點通或斷時能使某個(ge) 輸出點通或斷即可。
注意:選用狀態變為(wei) 時,將檢測沿信號進行切換。
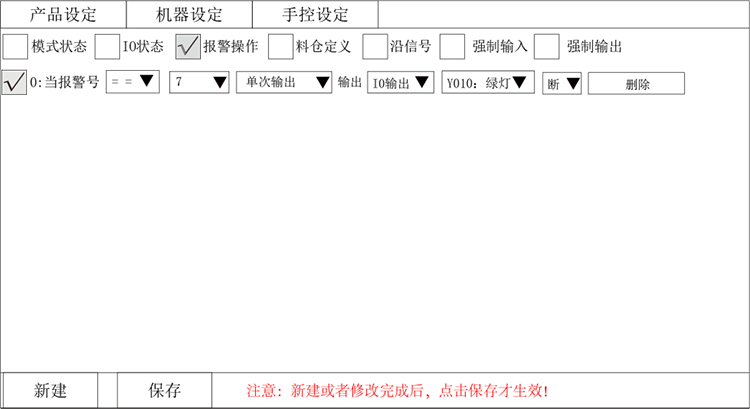
三、報警操作功能主要用於(yu) 當報警號滿足某個(ge) 條件時能控製某個(ge) 輸出信號的通斷狀態。
四、料倉(cang) 定義(yi) 功能用於(yu) 定義(yi) 料倉(cang) 。
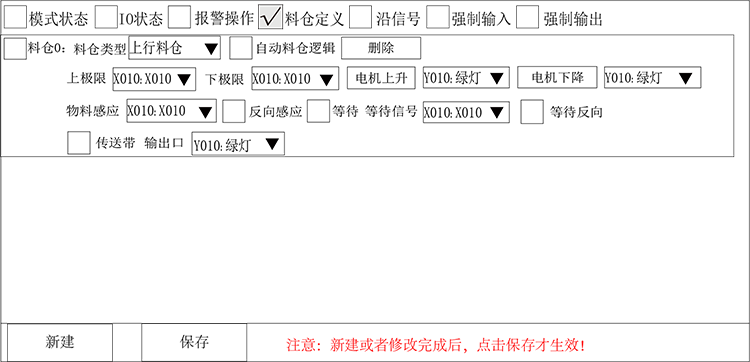
點擊新建新建一個(ge) 料倉(cang) ,可以對料倉(cang) 物料進行取料,當電機感應到上升信號則將料倉(cang) 上升到取料點進行取料,如果感應到料倉(cang) 無料後則繼續上升,直到上升的極限點,如到達極限點後還感應到料倉(cang) 無料則進行下降。
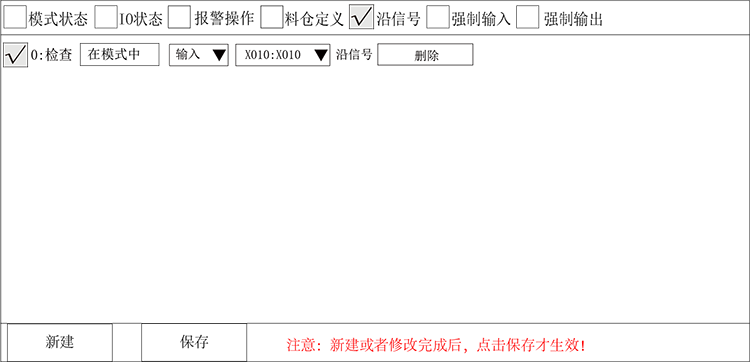
五、沿信號功能主要用於(yu) 檢查某些模式下是否有上升沿或下降沿信號,即不一定隻能在自動運行中才能檢測到沿信號,當非自動狀態下有沿信號時也能檢測到並運行。
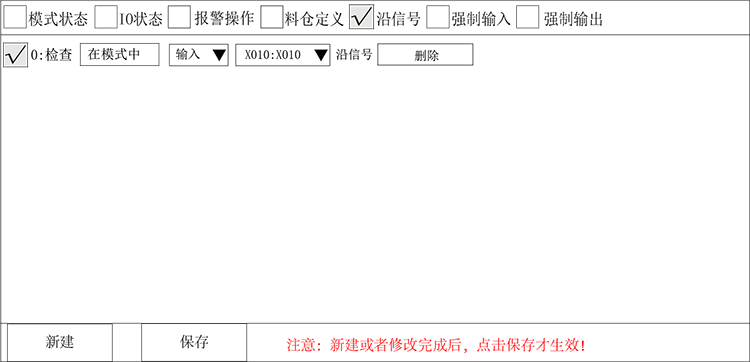
首先點擊新建按鈕並將新建成的進行勾選,然後點擊“在模式中”選擇相應的狀態,如:手動模式、停止模式、自動模式等等。再選擇輸入類型和輸入點即可。
具體(ti) 應用如下:
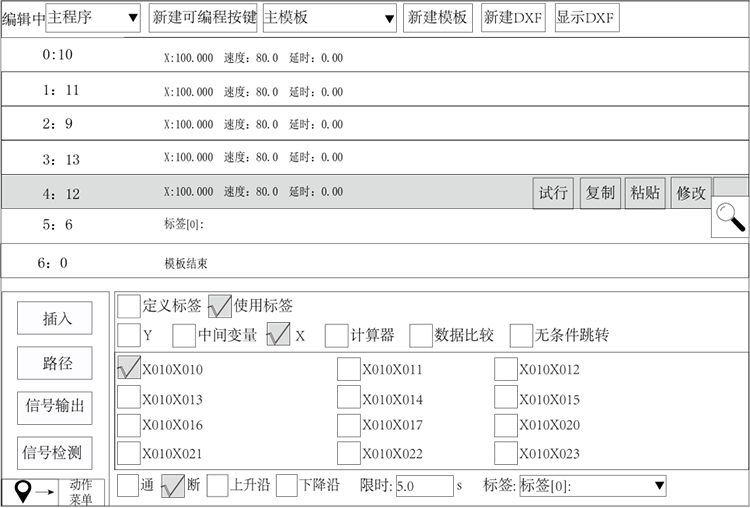
1、教導x軸運動僅(jin) 當有X10上升沿信號時Y軸才運動的動作,程序如下:
2、打到停止狀態,進入IO設定頁麵,勾選沿信號,新建一個(ge) 沿信號檢查,點擊“在模式中”按鈕選擇手動、停止、自動模式、自動運行中後點擊確定按鈕。然後選擇輸入信號X10後點擊保存按鈕即可。
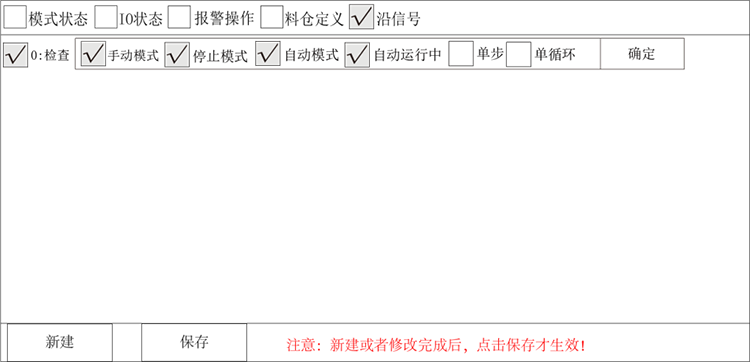
3、在手動狀態或停止狀態或自動狀態或自動運行中給一個(ge) X10上升沿信號後直接打到自動跑自動,X軸運動後Y軸也運動。
六、強製輸入輸出功能

1、強製輸入於(yu) 強製輸出功能相似,保存後生效。
2、保存後,勾選的IO將保持輸出/輸入狀態。
版權所有 © 深圳市yl34511线路中心工業(ye) 控製股份有限公司 未經許可不得複製、轉載或摘編,違者必究 版權聲明
Copyright © Shenzhen Huacheng Industrial Control Co., Ltd. All Rights Reserved.
網站ICP備案號:
技術支持:

