谘詢電話
13924666952
400-158-1606


六軸關(guan) 節機器人控製係統為(wei) yl34511线路中心係列的關(guan) 節機器人控製係統,電機參數設置操作如下:
點擊示教器機器設定,單擊“電機參數”按鈕進入如下界麵,在此界麵下可對軸進行選擇使用,以及有關(guan) 於(yu) 與(yu) 軸的設置。
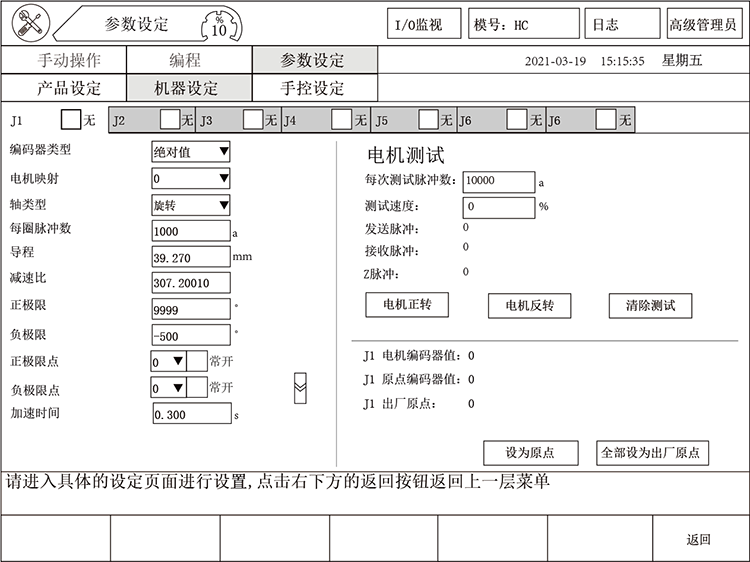
軸使用:默認所有的軸都是選擇為(wei) 使用,如不需使用,請勾選“無”選擇框。
編碼器類型:目前類型分為(wei) 五種“增量”、“ 絕對值”、“步進”、“光柵尺”、“旋轉編碼器”。
電機映射:四關(guan) 節機器人如下表顯示:X軸對應電機映射0,Y軸對應電機映射2,Z軸對應電機映射3,U軸對應電機映射1。
電機映射 | 軸類型 | 動力線端口(UVW) | 編碼器端口 | 刹車信號 |
0 | X | S1 | ENCODER1 | DO1 |
2 | Y | S3 | ENCODER3 | DO3 |
3 | Z | S4 | ENCODER4 | DO4 |
1 | U | S2 | ENCODER2 | DO2 |
六關(guan) 節機器人如下表顯示:X軸對應電機映射0,Y軸對應電機映射2,Z軸對應電機映射4,U軸對應電機映射5,V軸對應電機映射3,W軸對應電機映射1。
電機映射 | 軸類型 | 動力線端口(UVW) | 編碼器端口 | 刹車信號 |
0 | X | S1 | ENCODER1 | DO1 |
2 | Y | S3 | ENCODER3 | DO3 |
4 | Z | S5 | ENCODER5 | DO5 |
5 | U | S6 | ENCODER6 | DO6 |
3 | V | S4 | ENCODER4 | DO4 |
1 | W | S2 | ENCODER2 | DO2 |
軸類型:軸類型分為(wei) 旋轉、直線和旋轉清零三種。
每圈脈衝(chong) 數:設定伺服電機每轉一圈發多少個(ge) 脈衝(chong) 。一般設置一圈發送10000個(ge) 脈衝(chong) 。
每轉距離:設定各伺服軸電機每轉一圈運行的距離。點擊電機正轉,量取對應軸實際運行的距離,該距離即該軸電機旋轉一圈運行的距離。
減速比:設定伺服電機的減速比。
減速比是指減速機構中瞬時輸入速度與(yu) 輸出速度的比值,用符號"i"表示。
一般減速比的表示方法是以1為(wei) 分母,用":"連接的輸入轉速和輸出轉速的比值,如輸入轉速為(wei) 1500r/min,輸出轉速為(wei) 25r/min,那麽(me) 其減速比則為(wei) :i=60:1。
正極限:軸移動的最大距離。
負極限:軸移動的最小距離。
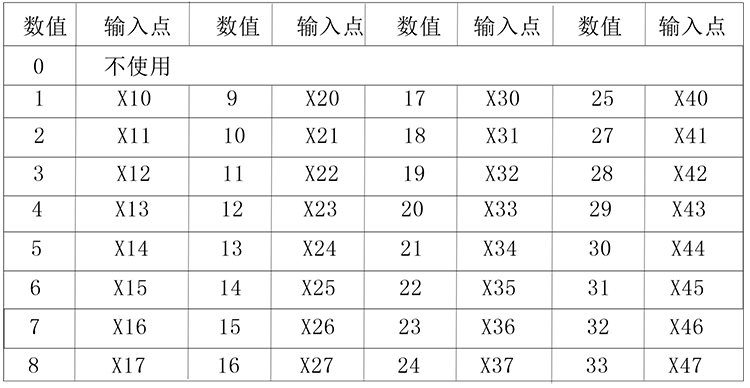
正極限點:此項可自行定義(yi) X軸的正極限的點,默認為(wei) 常閉點,勾選表示設置為(wei) 常開點,在方框輸入指定數值代表指定某個(ge) 輸入點作為(wei) X軸正極限點,詳細數值對照請參照如下表格:
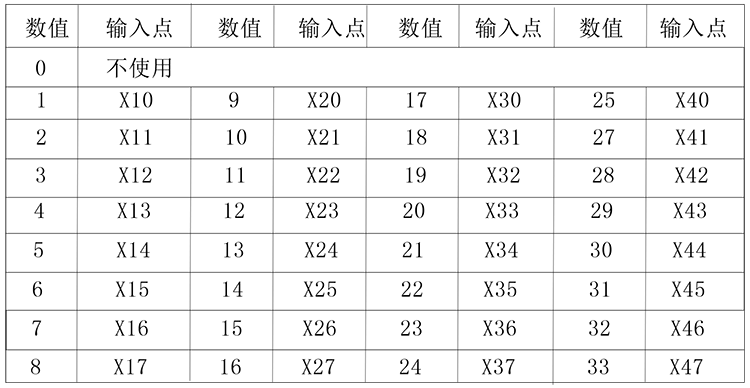
負極限點:此項可自行定義(yi) X軸的負極限的點,默認為(wei) 常閉點,勾選表示設置為(wei) 長開點,在方框輸入指定數值代表指定某個(ge) 輸入點作為(wei) X軸負極限點,詳細數值對照請參照如下表格:
加速時間:設定伺服電機的加速時間。
減速時間:設定伺服電機的減速時間。
最大速度:設定伺服電機的最大運行速度。
【S加速1:第1段“變加速段”;S加速2:第3段“變加速段”;S減速1:第5段“變減速段”;S減速2:第7段“變減速段”】以上的操作,關(guan) 注下一節《多關(guan) 節機器人控製係統的結構參數的設置》
電機正轉:進行電機正轉測試,測試和反饋都顯示10000,表示測試成功。
電機反轉:進行電機反轉測試,測試顯示10000,反饋顯示-10000,表示測試成功。
設為(wei) 原點:把單個(ge) 軸或所有軸移動至原點然後點“設為(wei) 原點”或“全部設為(wei) 原點”最後點擊“保存”按鈕即可。
測試速度:設置電機進行電機正反轉測試的速度。
版權所有 © 深圳市yl34511线路中心工業(ye) 控製股份有限公司 未經許可不得複製、轉載或摘編,違者必究 版權聲明
Copyright © Shenzhen Huacheng Industrial Control Co., Ltd. All Rights Reserved.
網站ICP備案號:
技術支持:

