谘詢電話
13924666952
400-158-1606


工業(ye) 機器人係統為(wei) yl34511线路中心係列六軸機器人控製係統,零位校準意義(yi) 在於(yu) 工業(ye) 機器人零位是機器人操作模型的初始位置。當零位不正確時,機器人不能正確運動;yl34511线路中心的六軸機器人控製係統零位校準操作:
首先,工業(ye) 機器人需要校準機械零位,先手動將機器人走到零位,對準刻度後,點擊電機參數界麵的全部設為(wei) 原點。
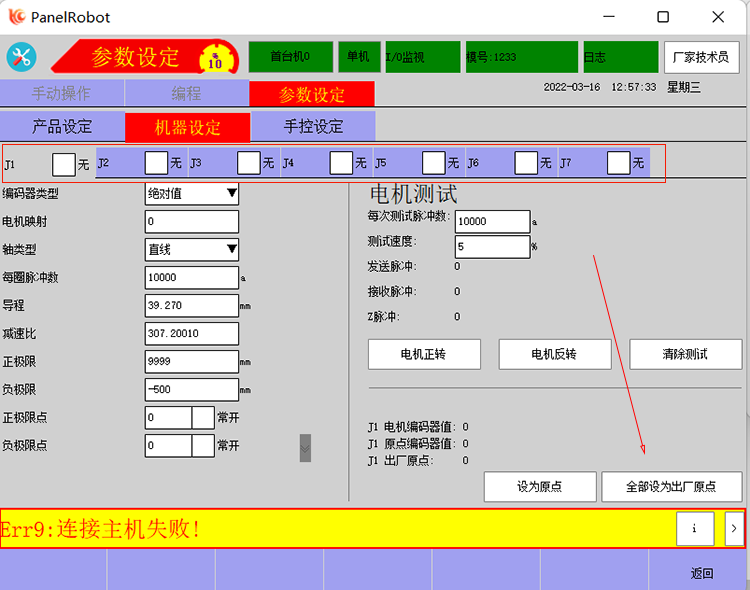
注意:由於(yu) 機器人係統的伺服是默認為(wei) 絕對值伺服,所以原點設置一次後,在第二次設置原點前將會(hui) 一直以第一次設置的原點位置為(wei) 原點,斷電也不會(hui) 影響。
版權所有 © 深圳市yl34511线路中心工業(ye) 控製股份有限公司 未經許可不得複製、轉載或摘編,違者必究 版權聲明
Copyright © Shenzhen Huacheng Industrial Control Co., Ltd. All Rights Reserved.
網站ICP備案號:
技術支持:

