谘詢電話
13924666952
400-158-1606


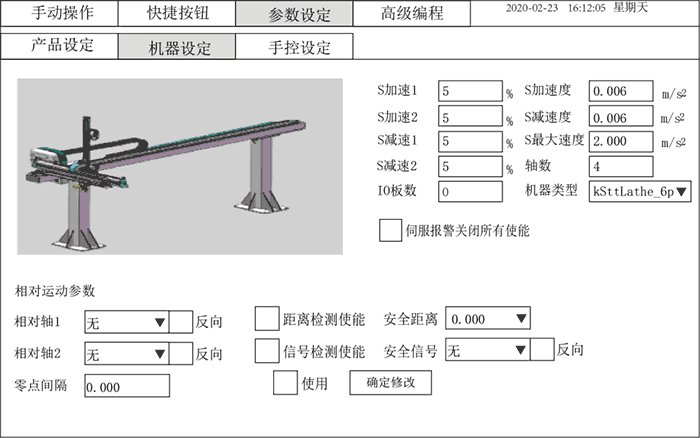
桁架車床機械手控製係統為(wei) yl34511线路中心係列車床驅控一體(ti) 係統,滿足1-8軸應用。係統結構參數內(nei) 容:
結構參數頁麵可以設置機械手走插補動作時的運動參數,包括加減速曲線、加減速時間和路徑的最大速度,區分與(yu) 電機參數中的加減速時間。
S加速度:執行插補運動時加速度,數字越大,加速越快,加速距離越短
S減速度:執行插補運動時減速度,數字越大,減速越快,減速距離越短
S最大速度:執行插補運動時機器的最大線速度
軸數:可以設置當前係統使用的軸數,範圍0 - 8;
IO板數:可以設置係統IO板個(ge) 數,每塊IO板有32個(ge) 輸入和32個(ge) 輸出IO,最多5塊IO板,至少一塊。除第一塊IO板以外,其餘(yu) 擴展IO板通過485端口1的方式通訊控製。
機器類型:kSttLathe-6P車床機型 6軸
相對運動參數:一般用於(yu) 雙臂碰撞安全限製,選擇兩(liang) 個(ge) 相對軸,設置零點間隔、安全距離、勾選距離檢測使能後雙臂距離小於(yu) 等於(yu) 安全距離即報警,勾選信號檢測使能可選擇安全信號,如信號通即報警,勾選反向即信號斷報警,使用該功能需要勾選使用並點擊確定修改。
零點間隔:兩(liang) 個(ge) 軸進行原點複歸後的距離。
距離檢測使能-安全距離:兩(liang) 個(ge) 軸保持的安全距離,若兩(liang) 軸的距離小於(yu) 等於(yu) 此安全距離立即報警。
信號檢測使能-安全信號:有安全信號輸入時立即報警,若勾選反向則為(wei) 無安全信號輸入時報警。
具體(ti) 使用情況如下:
假設原點複歸後X1和X2間的距離為(wei) 800mm,當X1和X2相距距離為(wei) 100mm時不安全,為(wei) 保證X1和X2不相撞,可設置相對軸1為(wei) X1,相對軸2為(wei) X2,零點間隔設為(wei) 800,勾選距離檢測使能,將安全距離設為(wei) 100,則當X1軸移動到400mm,則X2軸最多隻能移動到295mm(800-400-100=300,但為(wei) 了安全起見,當X2移動到還差5mm左右就到300時就會(hui) 報警)。
若勾選信號檢測使能,安全信號設為(wei) 1,則無論X1X2之間相距多少隻要有安全信號X10就會(hui) 立即報警。
伺服報警關(guan) 閉所有使能:勾選後,當有一個(ge) 伺服電機報警時,所有電機使能都會(hui) 斷開,請合理設置。
S曲線加速度:
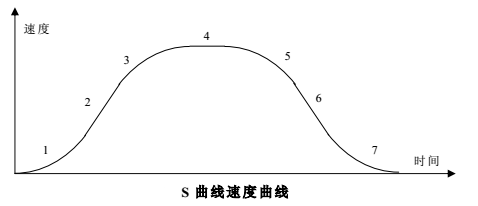
1、變加速段:加速度按照設定的加速度從(cong) 0遞增到最大加速度,速度按照加速度遞增。
2、勻加速段:加速度保持最大加速度不變,速度按照最大加速度遞增。
3、變加速段:加速度按照設定的加速度從(cong) 最大加速度遞減到0,速度按照加速度遞增。
4、勻速段:加速度為(wei) 0,速度保持目標速度不變。
5、變減速段:加速度按照設定的加速度從(cong) 0遞增到最大加速度,速度按照加速度遞減。
6、勻減速段:加速度保持最大加速度不變,速度按照最大加速度遞減。
7、變減速段:加速度按照設定的加速度從(cong) 最大加速度遞減到0,速度按照加速度遞減。
S加減速設定分別對應上圖線段如下所示:
S加速1:第1段“變加速段”。
S加速2:第3段“變加速段”。
S減速1:第5段“變減速段”。
S減速2:第7段“變減速段”。
版權所有 © 深圳市yl34511线路中心工業(ye) 控製股份有限公司 未經許可不得複製、轉載或摘編,違者必究 版權聲明
Copyright © Shenzhen Huacheng Industrial Control Co., Ltd. All Rights Reserved.
網站ICP備案號:
技術支持:

