谘詢電話
13924666952
400-158-1606


工業(ye) 機器人控製係統型號(EC-R4、EC-R6、EC-R7、EC-R8)EC-RX係列機器人控製係統,手動操作工具標定方法如下:
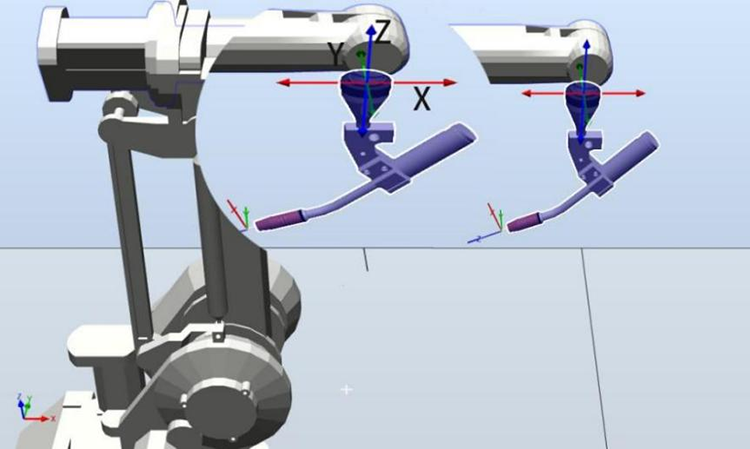
建立了工具坐標係後,機器人的控製點也轉移到了工具的尖端點上,這樣示教時可以利用控製點不變的操作方便地調整工具姿態,並可使插補運算時軌跡更為(wei) 精確。
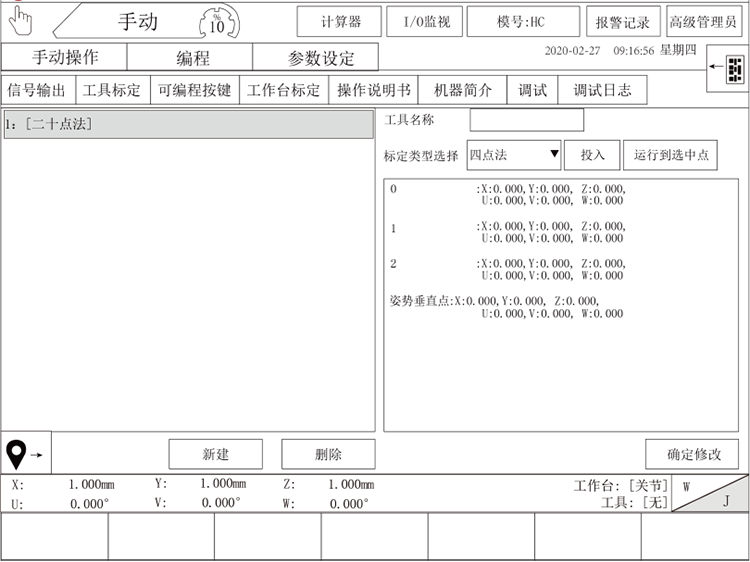
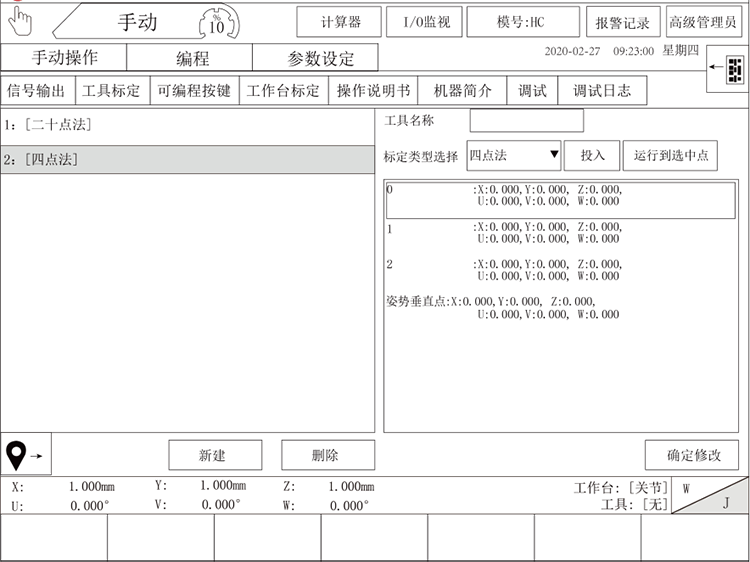
四點法:
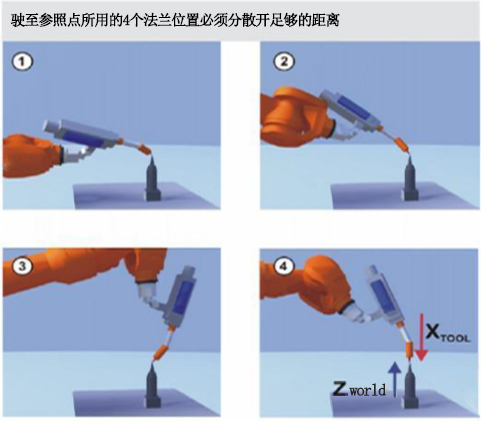
以控製點為(wei) 基準設入4個(ge) 不同的姿態的坐標位置,根據這4個(ge) 數據自動算出工具尺寸。應把各點的姿態設定為(wei) 任意方向的姿態,其中點4為(wei) 工具尖端垂直於(yu) 基準點的點,如果設入了偏向某一方向的姿態坐標,可能出現精度不準的情況。
示意圖如下:

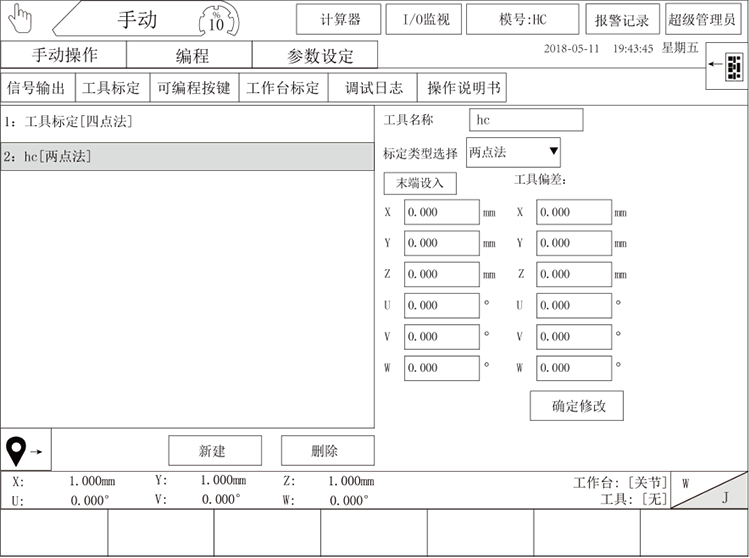
兩(liang) 點法:
兩(liang) 點法標定需要知道工具個(ge) 個(ge) 方向的偏差(偏差是指工具尖端點在法蘭(lan) 盤坐標係下的坐標值),然後填入偏差數據,用戶在已知工具的偏差的情況下才可使用兩(liang) 點法。
使用方法:
第一步,機械手在原點的情況下點擊“末端設入”按鈕設入機械手末端的坐標值。
第二步,手動輸入各軸的工具偏差值。
第三步,設置完成點擊確定修改按鈕。
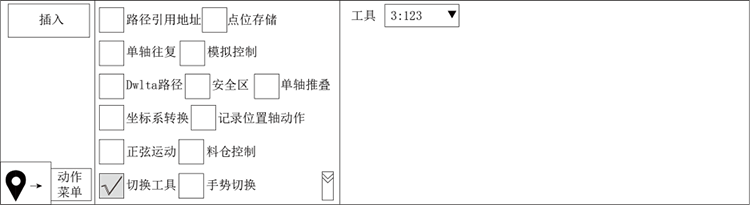
在教導程序的時候,需要將坐標係切換為(wei) 工具坐標係,然後在程序裏麵插入工具坐標係。
二十三點法:
二十三點法是根據示教的多點位置,換算出工具坐標與(yu) 法蘭(lan) 坐標係間的換算關(guan) 係,進而推算出工具坐標的方法。
使用方法:
第一步,新建二十三點法,在區域三依次設定23個(ge) 不同位置,要求工具定點不改變。最後三點要求姿勢相同的X方向偏移和Y方向偏移點。
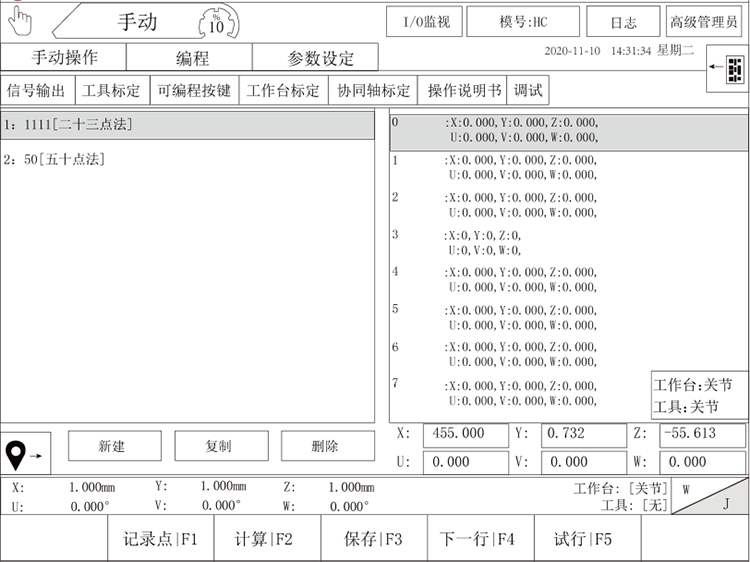
第二步,點擊計算,計算成功後將提示工具信息。
第三步,計算完成後點擊保存即可。
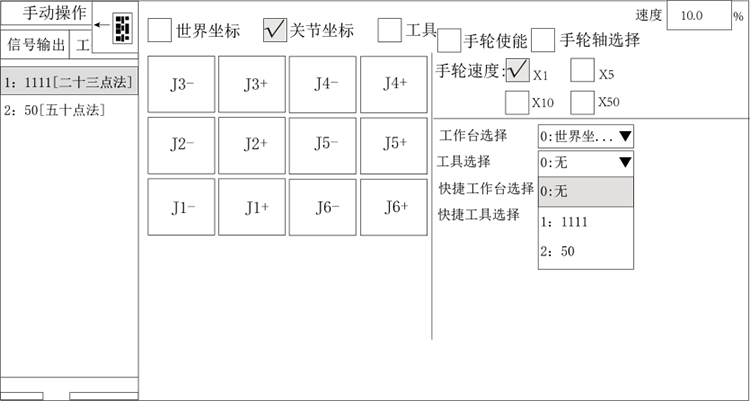
在教導程序之前首先切換為(wei) 工具坐標,才能教導出正確的坐標位置,在程序運行之前需要將程序坐標係切換為(wei) 工具坐標。如下圖:
版權所有 © 深圳市yl34511线路中心工業(ye) 控製股份有限公司 未經許可不得複製、轉載或摘編,違者必究 版權聲明
Copyright © Shenzhen Huacheng Industrial Control Co., Ltd. All Rights Reserved.
網站ICP備案號:
技術支持:

